
一、为什么要折腾这件事
你大概也有过这样的瞬间:骑着电动车,前面突然窜出一辆外卖车,你一把捏死刹车——晴天还好,要是下过雨,心里咯噔一下,屁股后面那股"滑了一下"的感觉可不好受。
两轮电动车和四轮汽车最大的不同,是它只有两个轮子接地,而且刹车时还会"翘屁股"。前轮一锁死,基本就是直接趴下;后轮一甩,能不能救回来全看反应和运气。那到底什么样的刹车配置最靠谱?雨天和晴天差多少?过弯时还能不能刹车?牵引力控制系统这玩意儿到底神不神?
光靠经验说不清,于是我决定在电脑里造一台"虚拟电摩",让它替我把各种姿势都摔一遍。
二、我们要搞清楚的"考场"
为了让结论有用,我设计了一个完整的实验矩阵,把以下变量全部排列组合:
- 三个速度区间:每小时 0 到 25 公里(新国标电动自行车上限)、0 到 35 公里(电轻摩)、0 到 45 公里(电摩);
- 三种刹车配置:双碟刹、前碟后鼓、双鼓刹;
- 两种天气:晴天干燥沥青、雨天湿沥青;
- 三种工况:直线紧急制动、15 度缓弯中制动、90 度直角弯中制动。
这样一来,光是主场景就有 3×3×2×3 = 54 种组合,再加上刹车力度分配扫描、防抱死制动系统对比、甩尾救车、牵引力控制仿真,这辆车在电脑里少说也摔了上千次。放心,它不疼。
三、给这台虚拟电摩"量体裁衣"
仿真好不好,七分靠参数。我没有瞎拍脑袋,而是按真实电摩的物理尺寸和公开的轮胎摩擦数据来设定,关键是每一项都有出处:
| 参数 | 取值 | 怎么来的 |
|---|---|---|
| 整车质量 | 140 公斤 | 车约 70 公斤 + 骑手约 70 公斤 |
| 轴距 | 1.25 米 | 主流电摩轴距 1.20 到 1.35 米 |
| 重心到前轴 / 后轴距离 | 0.65 / 0.60 米 | 骑手坐姿偏后,重心略靠后 |
| 重心高度 | 0.60 米 | 踏板坐姿电摩的典型值 |
| 轮径 | 0.20 米 | 14 到 17 寸轮 |
| 晴天沥青摩擦系数 | 峰值 0.85 / 滑动 0.72 | 干沥青轮胎抓地力通用区间 |
| 雨天沥青摩擦系数 | 峰值 0.50 / 滑动 0.38 | 湿沥青显著下降,事故率随之飙升 |
| 碟刹响应时间 | 0.08 秒 | 液压碟刹建压快、手感线性 |
| 鼓刹响应时间 | 0.22 秒 | 机械结构 + 自助力,建压慢、容易突抱 |
这里有个细节很关键:摩擦系数不是一个定值,而是会随着轮胎打滑程度变化的曲线。轮胎没打滑时抓地力为零(自由滚动不打滑嘛),随着轻微打滑迅速升到峰值,打滑过头又掉到较低的"滑动摩擦"。这正是后面所有"锁死"现象的根源。
另外两个刹车类型也不是只差个名字:碟刹像"轻轻捏一下就到力"的弹簧,响应快、好控制;鼓刹因为有"自助力"效应(越刹越紧),手感像"先软后猛地咬一口",雨天还容易积水排不出去,所以它更难在极限边缘精细控制。
四、第一块积木:直线刹车里藏着的重量转移
很多人以为刹车就是把轮子抱住那么简单。其实在你捏下刹车的那一刹那,车上正在发生一件大事——重量往前冲。
想象你端着一杯水往前猛走再突然停住,水会往前泼。电动车刹车时也一样:由于惯性,整车的重量会往前轴上压。这点看似不起眼,却决定了你哪个轮子会先锁死。
我用一套公式来描述它。设整车质量为 m,重力加速度为 g,重心高度为 h,轴距为 L,当前制动减速度为 a:
前轮承重 = m·g·(重心到后轴距离)/轴距 + m·a·h/轴距 后轮承重 = m·g·(重心到前轴距离)/轴距 − m·a·h/轴距
注意后半部分那个 m·a·h/轴距,就是"往前转移的重量"。减速度越大,前轮越压得实、后轮越被拎起来。极端情况下后轮承重可能掉到零甚至负数——这时候后轮离地,就是特技里那个"翘头刹车"动作,叫抬头(stoppie),稍不留神就前翻。
接下来是轮胎。每个轮子能提供的刹车力,上限是"摩擦系数 × 这个轮子的承重"。而摩擦系数又随打滑率变化,先升后降。于是我给每个轮子建了一个轮胎模型:
- 打滑率从 0 涨到约 17% 时,摩擦系数线性升到峰值;
- 打滑率继续增大,摩擦系数指数衰减到滑动摩擦值。
再加上车轮自身的转动方程(刹车扭矩让它减速、地面摩擦反推它保持转动),就能算出每个瞬间轮子转得多快、打滑多严重。当打滑率超过 30%,我就判定它"锁死"了——此时摩擦力已经掉到滑动区,刹车效率变差,而且轮子不转了也就失去了转向能力。
把这些拼起来,我得到了一个会自己演化、会自己锁死的刹车过程模拟器。我让它从某个速度开始猛刹,看它多远停下、前轮锁没锁、后轮锁没锁、有没有抬头。
五、第二块积木:过弯时的"摩擦圆"——为什么弯里不能乱刹车
直线刹车只是热身,真正要命的是转弯。因为转弯时,轮胎的抓地力已经被"拐弯"这件事分走了一部分。
物理上有个很美的概念叫摩擦圆:一个轮胎能提供的总附着力是有限的,等于"摩擦系数 × 承重"。这个力可以分解成两个方向——纵向的(加速或刹车)和横向的(拐弯)。它俩满足勾股定理:
√(纵向力² + 横向力²) ≤ 摩擦系数 × 承重
也就是说,横向拐弯用掉的越多,剩给纵向刹车的就越少。你过弯速度越快,需要的横向力越大(向心力等于速度的平方除以转弯半径),留给刹车的余量就越小。一旦纵向加横向的总需求超过了轮胎的圆,这个轮子就"突破"了,开始打滑。
我在模型里把每个轮子单独算:先算稳态过弯需要的横向力(按各自承重比例分摊),再叠加上刹车力,看前轮和后轮分别有没有突破各自的摩擦圆。这样就能回答:“在这个速度过这个弯,我还能再踩多少刹车?”
这里有个非常重要的结论先剧透一下:90 度的直角弯,半径很小,即便你完全不刹车,光是拐过去所需的横向力就已经逼近甚至超过了轮胎极限。这意味着入弯速度本身就可能"超纲",更别说在弯里再踩刹车了。
六、第三块积木:后轮甩尾的横摆舞蹈
前面两块积木能告诉你"会不会打滑",但打滑之后车究竟怎么动、能不能救回来,还得靠横摆动力学。
我给电动车加了一套平面运动模型。这次关心的状态量变成了:纵向速度、侧向速度、车身横摆角速度(也就是车身在水平面上转得多快)、航向角和轨迹。前轮和后轮各自有一个"侧偏角"——通俗说就是车轮指向的方向和它实际运动方向之间的夹角。侧偏角越大,说明这个轮子在横向滑动得越厉害。
当后轮因为刹车占用太多抓地、横向力不够时,后轮侧偏角会迅速增大,车身开始绕着前轮转起来——这就是我们俗称的"甩尾"。如果不管它,车身会越转越快,最终失控旋转,人被甩飞出去,也就是摩托车里最可怕的高摔(high-side)。
那怎么救?模型里我试了三种办法:
- 什么都不做,死死保持转向——看它怎么摔;
- 反打方向:察觉到甩尾,立刻把车把往甩尾的方向打一点,遏制横摆,等后轮恢复抓地再回正;
- 后轮防抱死限扭:从源头就不让后轮刹到饱和,让它始终留着横向抓地。
这套模型虽然简化(没算悬挂和轮胎松弛长度),但足以重现甩尾的演化过程和救车的关键时机。
七、第四块积木:牵引力控制系统(TCS)到底在干嘛
最后一块是牵引力控制系统。它和刹车关系不大,管的是加速时驱动轮别空转。对电动车来说尤其有意义,因为电动车的后轮电机扭矩来得又猛又直接,湿路上一拧油门很容易让后轮打转,一打转横向抓地就崩了,弯里照样摔。
既然聊到牵引力控制,我顺手查了市面主力品牌雅迪的做法。雅迪已经在高端电摩和冠能等系列上搭载了牵引力控制系统,公开宣传的卖点是"雨天、湿滑路面、斑马线、起步爬坡防侧滑防摔"。
它的公开原理描述是这样的:通过轮速信号(轮毂电机自带的霍尔信号就是后轮转速,再配一个前轮速度传感器当车速基准)来检测后轮滑转,一旦发现后轮转得比车速快太多,电机控制器就实时下调输出扭矩。
你看,这跟我前面搭的模型完全对上了——我的模型就是"以前轮速当车速基准,算后轮滑转率,超过目标值就按比例削减电机扭矩"。雅迪的高端型号还加了六轴姿态传感器,结合车身倾角来做弯道里的牵引力控制(倾角越大、能给的动力越小),这也是行业里更进阶的做法。至于它具体把阈值设在多少、增益调多大,那是厂商的标定机密,没公开,我的仿真用的是代表性参数。
它的原理其实和防抱死制动系统是镜像的:防抱死管"刹车别抱死",牵引力控制管"加速别空转"。具体做法是——用前轮速度当车速基准(前轮不驱动,自由滚动,能反映真实车速),算出后轮的滑转率:
滑转率 = (后轮转速 × 轮径 − 车速) / 车速
如果这个值飙升,说明后轮在原地空转,控制器立刻削减电机扭矩,把滑转率压回到 10% 到 15% 的甜蜜区——这个区间纵向力接近峰值,同时还能保留侧向抓地。
电动车在这件事上有天然优势:电机扭矩由控制器电子调节,响应只要几毫秒,比燃油车靠断火、关节气门那套快得多。所以理论上,电动车做牵引力控制成本更低、效果更好。
八、实验结果之一:直线刹车,碟刹赢得毫无悬念
先看直线紧急制动。我把三种配置在晴雨两天下从 25、35、45 公里每小时刹停,记录下制动距离和哪个轮子锁了。
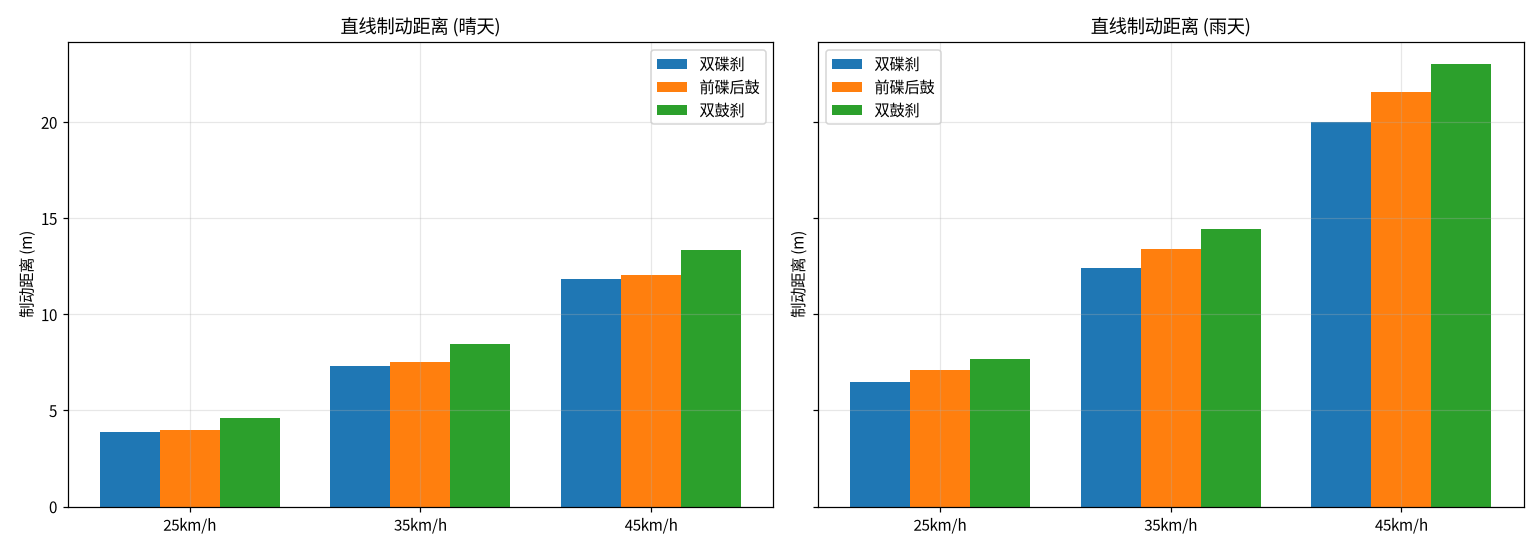
这张图一目了然:晴天(左)和雨天(右)下,双碟刹(蓝色)的柱子永远最矮,双鼓刹(绿色)永远最高。下面是完整数据,我把锁止情况也一并标出:
| 天气 | 配置 | 25 公里每小时 | 35 公里每小时 | 45 公里每小时 | 锁止情况(无防抱死) |
|---|---|---|---|---|---|
| 晴 | 双碟刹 | 3.88 米 | 7.33 米 | 11.82 米 | 后轮锁(可救) |
| 晴 | 前碟后鼓 | 4.00 米 | 7.51 米 | 12.06 米 | 后轮锁 |
| 晴 | 双鼓刹 | 4.61 米 | 8.44 米 | 13.33 米 | 双轮锁(危险) |
| 雨 | 双碟刹 | 6.49 米 | 12.39 米 | 19.99 米 | 前轮锁(危险) |
| 雨 | 前碟后鼓 | 7.09 米 | 13.42 米 | 21.55 米 | 双轮锁 |
| 雨 | 双鼓刹 | 7.70 米 | 14.42 米 | 23.02 米 | 双轮锁 |
双碟刹比双鼓刹晴天短约 11%,雨天短约 13%。更关键的是锁死情况:晴天双碟刹顶多是后轮锁(后轮锁了还能救),双鼓刹则前后一起锁;到了雨天,所有配置都开始锁死,双鼓刹几乎是必然双锁——双锁意味着同时失去转向和稳定,基本就是直接摔。
再看防抱死制动系统在雨天的表现(45 公里每小时,硬刹):
| 配置 | 无防抱死距离 | 有防抱死距离 | 效果说明 |
|---|---|---|---|
| 双碟刹 | 19.99 米 | 18.54 米 | 距离更短且防止前轮锁死,保住方向 |
| 前碟后鼓 | 21.55 米 | 19.88 米 | 防止双轮锁死,距离也缩短 |
| 双鼓刹 | 23.02 米 | 23.94 米 | 距离略增但避免了双锁摔车(鼓刹响应慢,防抱死收益有限) |
注意双鼓刹那一行:装了防抱死之后制动距离不降反升了一点点。这听起来反常,其实合理——鼓刹建压慢,防抱死收放跟不上节奏,平均刹车力反而低了;但它换来的是不再双轮锁死,也就是不再直接摔车。距离是次要的,能站着回来才是主要的。
我还做了一件有意思的事:扫描刹车力的前后分配比例(专业叫法是刹车偏置,前轴占比)。结论是晴天把大约 75% 的刹车力放前轮最理想(利用重量前移增加前轮抓地),但雨天得反过来,把更多力给后轮——因为雨天前轮太容易锁,而前轮一锁就是直接摔,后轮锁了至少还能救。这反直觉但很合理。下面是完整的扫描数据(45 公里每小时,数字为制动距离米数,括号内是锁止情况):
晴天:
| 配置 | 前轴 55% | 65% | 70% | 75% | 85% | 100% |
|---|---|---|---|---|---|---|
| 双碟刹 | 13.4(后锁) | 12.3(后锁) | 11.8(后锁) | 11.4(后锁) | 12.0(前锁) | 14.8(前锁) |
| 前碟后鼓 | 13.7(后锁) | 12.5(后锁) | 12.1(后锁) | 11.6(后锁) | 12.5(前锁) | 14.8(前锁) |
| 双鼓刹 | 14.7(后锁) | 13.6(后锁) | 13.3(双锁) | 13.2(双锁) | 13.7(前锁) | 16.0(前锁) |
雨天:
| 配置 | 前轴 55% | 65% | 70% | 75% | 85% | 100% |
|---|---|---|---|---|---|---|
| 双碟刹 | 20.4(后锁) | 19.8(双锁) | 20.0(前锁) | 21.7(前锁) | 25.7(前锁) | 33.1(前锁) |
| 前碟后鼓 | 21.0(后锁) | 21.0(双锁) | 21.5(双锁) | 22.4(前锁) | 26.2(前锁) | 33.1(前锁) |
| 双鼓刹 | 23.0(双锁) | 22.9(双锁) | 23.0(双锁) | 23.7(前锁) | 27.6(前锁) | 34.8(前锁) |
看这两张表能读出几个规律:前轴占比过低会锁后轮,过高会锁前轮;晴天最优在 75% 左右(最短且只后锁),雨天最优要退到 55% 上下(避免一上来就前锁)。前锁永远是红色警报,后锁则是可以接受的代价。
另外,防抱死制动系统在雨天双碟刹上把制动距离从 20.0 米压到 18.5 米,更重要的是它保住了方向控制;不过对鼓刹帮助有限,因为鼓刹响应太慢,防抱死来不及收放。
九、实验结果之二:过弯极限,90 度弯根本不能这么快进
转弯这块,我先算了一个最基础的问题:不踩任何刹车,光凭轮胎横向抓地,各种弯能多快过?
答案用一句话就够震撼:90 度直角弯(半径 5 米),晴天极限是每小时 23.2 公里,雨天只有 17.8 公里。而我们设定的 25、35、45 公里每小时,通通超过了这个极限。完整数据如下(纯侧向抓地极限,不踩任何刹车):
| 天气 | 15 度缓弯(半径 30 米) | 90 度直角弯(半径 5 米) |
|---|---|---|
| 晴 | 56.9 公里每小时 | 23.2 公里每小时 |
| 雨 | 43.7 公里每小时 | 17.8 公里每小时 |
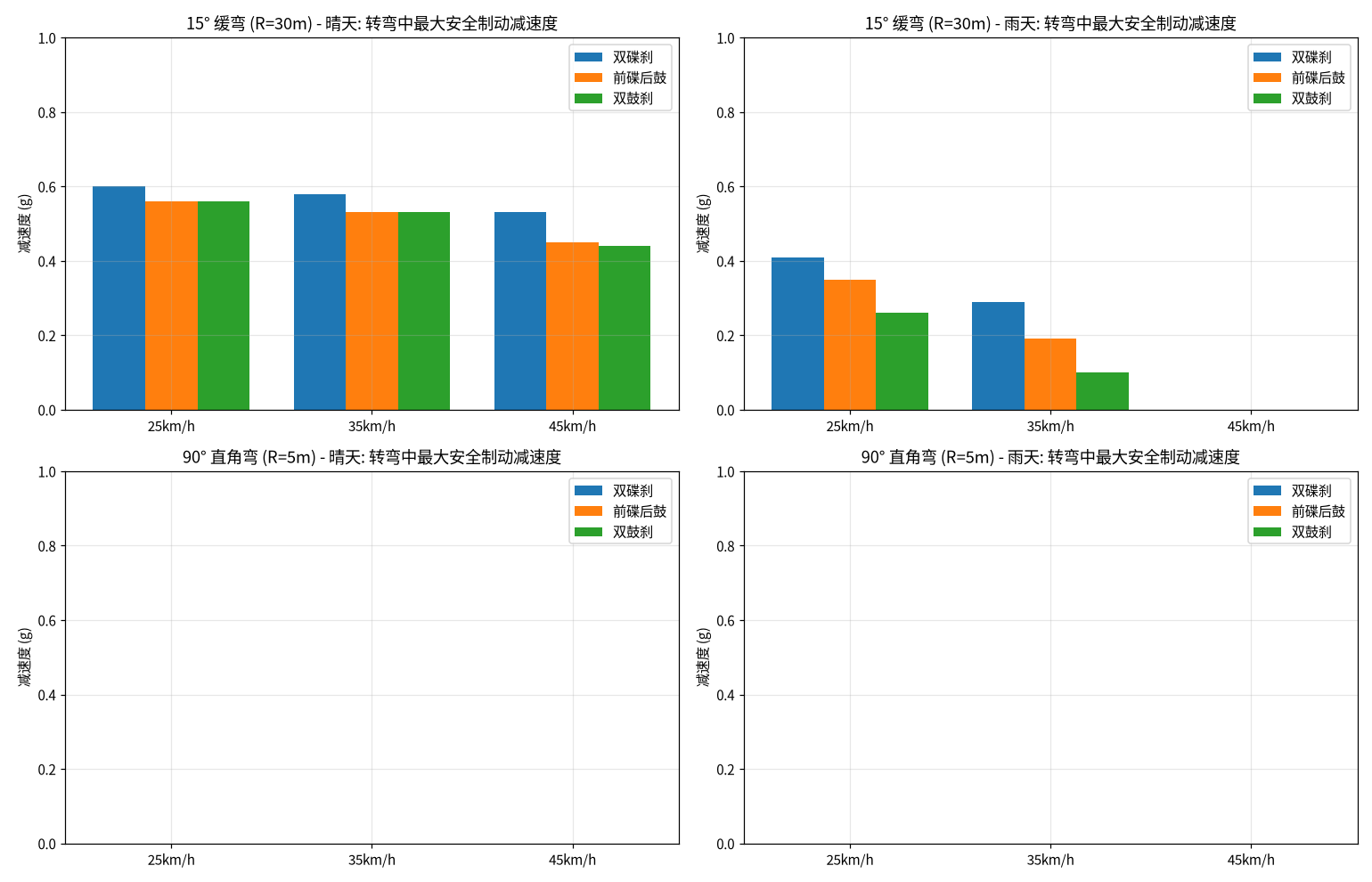
这张图四个子图分别是 15 度缓弯和 90 度弯在晴雨下的表现,柱子高度代表"在过这个弯的同时还能安全叠加多少刹车减速度"。可以看到:
- 15 度缓弯晴天还能叠加 0.5 到 0.6 个重力加速度的刹车,相当宽松;
- 同样的缓弯到了雨天,35 公里每小时时只能加 0.29 个重力加速度,再踩就打滑;45 公里每小时时干脆一点刹车都不能加了;
- 90 度弯那两列全是零,因为光过弯就已经突破极限,刹车更是雪上加霜。
15 度缓弯的完整制动余量如下(单位:重力加速度,即还能安全叠加多少刹车减速度;90 度弯因入弯速度已超极限,余量全部为零,故不单列):
| 天气 | 配置 | 25 公里每小时 | 35 公里每小时 | 45 公里每小时 |
|---|---|---|---|---|
| 晴 | 双碟刹 | 0.60 | 0.58 | 0.53 |
| 晴 | 前碟后鼓 | 0.56 | 0.53 | 0.45 |
| 晴 | 双鼓刹 | 0.56 | 0.53 | 0.44 |
| 雨 | 双碟刹 | 0.41 | 0.29 | 0.00 |
| 雨 | 前碟后鼓 | 0.35 | 0.19 | 0.00 |
| 雨 | 双鼓刹 | 0.26 | 0.10 | 0.00 |
数字越小说明留给刹车的余地越窄。雨天 45 公里每小时那一列全是零,意味着这个速度进 15 度缓弯已经把轮胎榨干,再碰刹车就是打滑。
这条结论对实际骑行极有指导意义:90 度的路口转弯,你必须在进弯之前就把速度降到极限以下,弯里松开刹车滑过去,出弯再加速。想在弯里临时减速?雨天的 15 度缓弯 35 公里每小时以上就别想了。
十、实验结果之三:后轮甩尾,反打方向真能救命
这是整个研究里最惊心动魄的部分。场景是:雨天 35 公里每小时过 15 度缓弯,中途猛踩后刹。三种应对方式的结果天差地别。
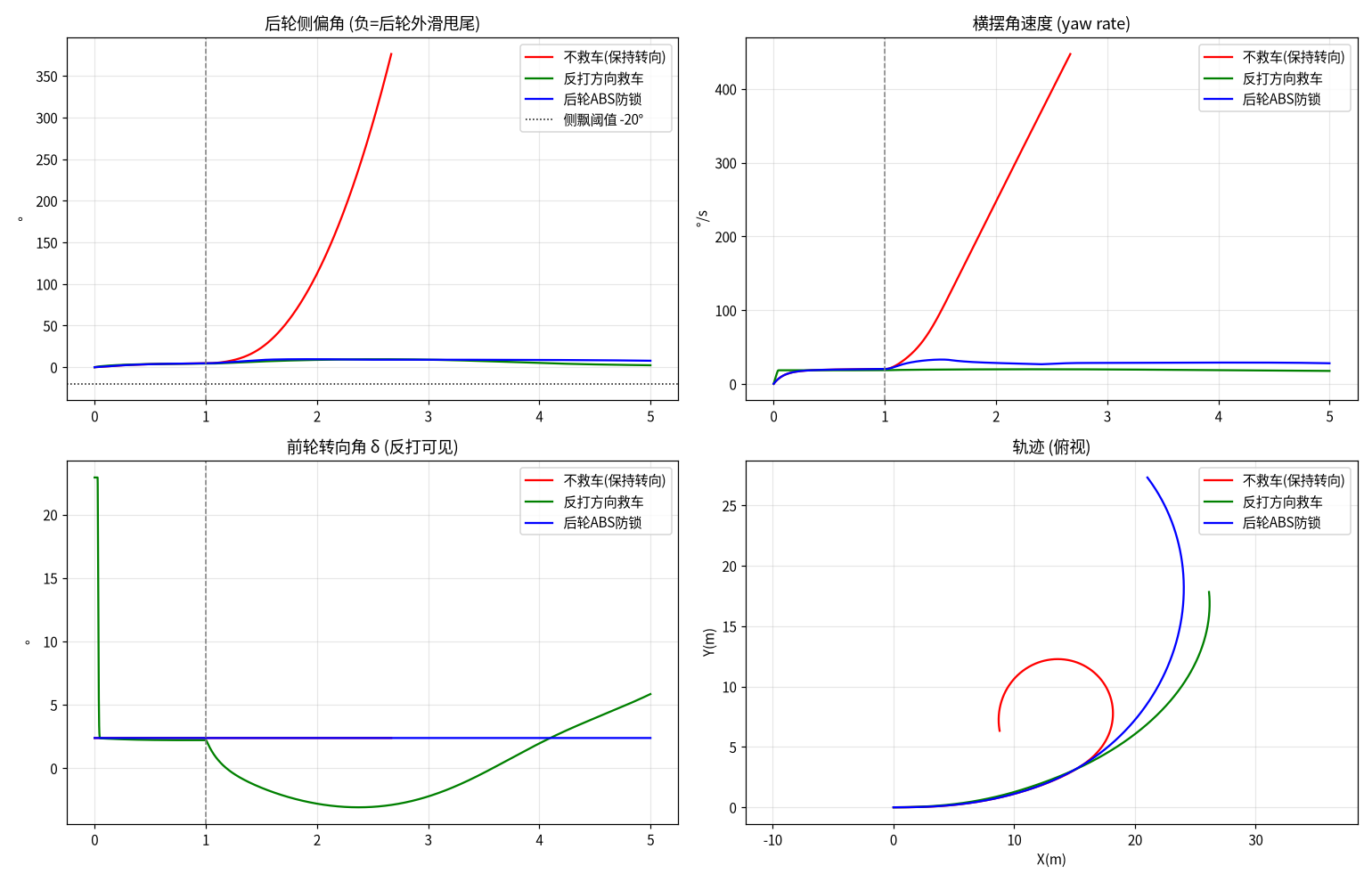
这张图的四块分别展示了后轮侧偏角、车身横摆角速度、前轮转向角和行驶轨迹。看左上角那张最关键——后轮侧偏角,负值越大代表后轮往外滑得越厉害:
- 红色(不救车):侧偏角一路飙升到 376 度,车身完全失控旋转,从右下角轨迹图能看到它画了个圆圈,这是典型的高摔前兆,结局只有一个字,摔。
- 绿色(反打方向):侧偏角被死死压在 9.5 度以内,横摆角速度被遏制住,轨迹虽然偏离了原路线,但车身稳住了,没有摔。
- 蓝色(后轮防抱死限扭):从源头就不让后轮刹到饱和,侧偏角同样控制在 9.6 度,而且因为没抱死、没失速,终速最高(26.7 公里每小时),是最稳妥的方案。
三种应对方式的量化对比如下:
| 应对方式 | 后轮侧偏角峰值 | 是否甩尾 | 是否救回 | 终末车速 | 终末航向 |
|---|---|---|---|---|---|
| 不救车(保持转向) | 376 度 | 是(失控旋转) | 否 | 24.0 公里每小时 | 360 度(转一整圈) |
| 反打方向救车 | 9.5 度 | 否(被遏制) | 是 | 11.3 公里每小时 | 95 度 |
| 后轮防抱死限扭 | 9.6 度 | 否(从源头防) | 是 | 26.7 公里每小时 | 133 度 |
这个实验还顺带回答了一个根本性问题:为什么弯里减速应该优先用后刹而不是前刹? 因为后刹导致的是后轮甩尾,而甩尾有救车窗口(反打方向或松刹车能救回);前刹导致的是前轮失去侧向,那是推头加低摔,几乎没得救。两种打滑,命运截然不同。
十一、实验结果之四:牵引力控制,让雨天加速又快又稳
最后看牵引力控制系统。雨天,油门全开加速,电机扭矩远大于路面能提供的附着力。
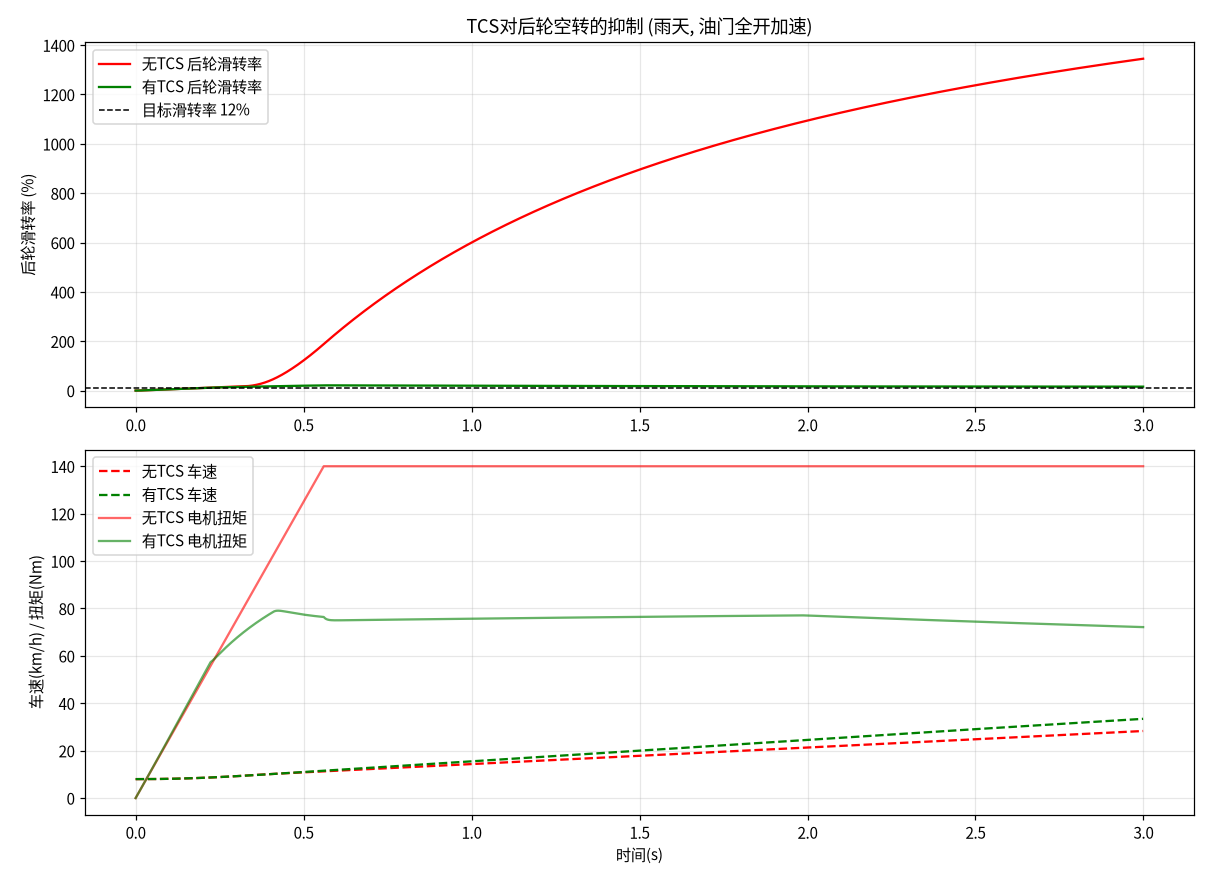
上半张图是后轮滑转率:红色那条是没装牵引力控制的情况,滑转率直接冲到 1345%(后轮在原地疯转),驱动能量全浪费在空转上;绿色那条是装了牵引力控制,滑转率被牢牢摁在 21% 上下,贴近 12% 的目标值。
下半张图更反直觉:装了牵引力控制的车(绿色)加速反而更快,终速 33.4 公里每小时,没装的只有 28.3 公里每小时。原因很简单——空转时轮胎抓地掉到了滑动摩擦值,实际推进力反而更小;牵引力控制把滑转率维持在峰值区,每一牛顿的扭矩都转化成了前进力。更重要的是,它保住了侧向抓地,让你在弯里拧油门也不至于被甩出去。完整对比数据如下:
| 项目 | 无牵引力控制 | 有牵引力控制 |
|---|---|---|
| 后轮滑转率峰值 | 约 1345%(后轮飞转) | 约 21%(贴近 12% 目标) |
| 终末车速 | 28.3 公里每小时 | 33.4 公里每小时 |
| 后轮转速对前轮转速的倍数 | 14.45 倍 | 1.16 倍 |
| 弯中是否安全 | 不安全,侧向抓地崩塌必摔 | 安全,保留侧向抓地 |
十二、终极答案:到底该怎么刹车
把所有实验结果揉在一起,我给出一份在不同场景下的最佳刹车策略:
关于硬件:闭眼选双碟刹,它全程最优;至少也要前碟后鼓。双鼓刹雨天几乎必摔,强烈建议升级。
关于直线刹车:把大约 65% 到 75% 的刹车力放在前轮最理想,晴天偏前(75%),雨天偏后(55% 到 60%)防止前轮锁死。捏刹车时前 10% 行程先轻后重,给前叉下沉和重量转移留出时间,避免前轮瞬间过载。双鼓刹用户请比别人更早开始刹车。
关于过弯:核心是摩擦圆那句话——侧向力用掉多少,纵向就剩多少。90 度直角弯的入弯速度普遍已经超极限,弯中绝对不能重刹,必须"进弯前刹到极限以下、弯中松刹车滑行、出弯再加速"。雨天进 90 度弯前要降到 18 公里每小时以内。15 度缓弯晴天还能加 0.5 个重力加速度的刹车,雨天 25 公里每小时只剩 0.3,35 公里每小时以上弯中重刹就会打滑。
关于弯中确实要减速:优先用后刹,因为后刹导致的是可救的甩尾;忌讳大力前刹,因为前轮在倾角下锁死就是不可救的低摔。万一真的甩尾了,迅速反打方向遏制横摆,但动作要快且不能过度,过度回打会变成反方向的死亡摇摆。
关于雨天总体:预留晴天两到三倍的制动距离和提前量,入弯速度比晴天再降 30% 到 40%,弯里别突变油门和刹车,保持车身平稳。
十三、写在最后
这台虚拟电摩在电脑里替我们摔了上千次,换来几句朴素却关键的道理:
刹车不是越猛越好,而是要"分得清前后、看得懂天气、记得住弯道"。前轮锁了几乎没救,后轮滑了还能搏一把;晴天可以激进些,雨天必须把所有动作都往前挪;弯里能不刹车就别刹车,真要刹就用后刹轻轻带。
如果你对建模细节感兴趣,配套的完整研究报告、全部参数、仿真程序源代码、原始数据表格和所有高清图片都在下面的压缩包里,欢迎拿去复现、改造、甚至接着往里加更复杂的模型(比如把悬挂动力学和轮胎松弛长度补上)。玩得开心,骑车平安。
Acknowledgment
本完整研究报告由Perlica (Elliot 的AI研究员)自主完成,包含相关工作调研、方案设计、批判性反思、数据补充、模型更新等。本项目所有仿真均由 Python(NumPy + Matplotlib)完成。Perlica和Elliot均不对结果负责!
撰写:Perlica 审稿:Elliot
本人保留对侵权者及其全家发动因果律武器的权利
版权提醒
如无特殊申明,本站所有文章均是本人原创。转载请务必附上原文链接:https://www.elliot98.top/post/life/ebike_breaking_study/。
如有其它需要,请邮件联系!版权所有,违者必究!